基于优化策略自校正控制器
几十年来,常规的PID控制器的研究,不论是在理论还是实践上都作了大量的工作,因而被应用于各种过程控制,并得到了良好的效果。随着科学技术的发展人们对控制的系统的要求越来越高,特别是那些被控参数是未知或存在参数变化或不确定扰动的控制过程,想要取得良好的控制效果,就必须进行在线调节控制器得参数。但是想要对PID控制器进行在线参数调节是十分困难的。如果采用自校正技术就可以自动调节调节器或控制参数,使系统在较好的性能下运行。
1.最小方差控制
1.1提出
最小方差控制的概念(Self-tuning Regulators,自校正调节器)最初由Åström等人在1973年提出。目的是最大限度地减小干扰对系统的影响。
1.2最小方差的思想
通过保证包含输出的某一随机变量的方差取最小来设计当前时刻的控制量𝑢(𝑘)。为此,必须使得系统输出中包含当前时刻的控制量。假设被控对象或过程存在𝑑步的纯延时,那么当前时刻的控制作用𝑢(𝑘)要滞后𝑑个采样周期才能在输出中体现出来,这样我们可以选择并通过保证包含输出𝑦(𝑘 + 𝑑)的某一变量的方差最小来设计当前时刻的控制量。设计过程中,借助输出量的预测信息计算出当前时刻的控制量。当过程参数未知或时变时先用递推最小二乘法估计相应的参数,或直接估计控制器参数,然后算出𝑢(𝑘)。这样,通过连续不断地进行预测和控制,就能始终保持输出的某一方差一直取最小。
- 由于输出中必须包含当前时刻的控制量𝑢(𝑘)才能通过使得输出的方差取最小求得当前时刻的控制量,而系统存在𝑑步的纯延时,因此包含当前时刻控制量的最早时刻的系统输出是𝑦(𝑘 + 𝑑) 。这意味着,我们可以选择𝑦(𝑘 + 𝑑) 、并通过使得包含𝑦(𝑘 + 𝑑) 的某一随机变量的方差取最小来计算𝑢(𝑘)。
- 数学上,用𝑘时刻和之前时刻的控制量和输出量将实际输出𝑦(𝑘 + 𝑑)表示出来的式子称为对𝑘 + 𝑑时刻的实际输出𝑦(𝑘 + 𝑑)的预测模型,因此我们也将实际输出𝑦(𝑘 + 𝑑)称为预测模型的输出。𝑘对每个时刻均成立。
- 由于未来时刻的实际输出𝑦(𝑘 + 𝑑)是未知的,因此我们只能将其看作一个变量。考虑到当前时刻到𝑘 + 𝑑时刻这段时间内,干扰一直影响着系统,我们进
一步将实际输出或预测模型的输出𝑦(𝑘 + 𝑑)看作一个随机变量是合理的。 - 由于自校正的功能一般都是用小型计算机或微处理器实现,因此受控系统的数学模型都用离散形式。
1.3单输入单输出受控系统模型
可以用受控自回归滑动平均模型(CARMA)表示(线性、定常、离散):
其中,𝑦(𝑘)为𝑘时刻的输出;𝑢(𝑘)为𝑘时刻的控制输入;{𝜈(𝑘)}是零均值白噪声序列,𝑑为相应滞后步数。引入单位滞后算子𝑞−1,上式可写为
其中,
红色部分称为滑动平均项,绿色部分称为自回归项。(2)式也可写为:
其中,红色部分被称为过程或对象模型;绿色部分被称为噪声模型,也称为成形滤波器。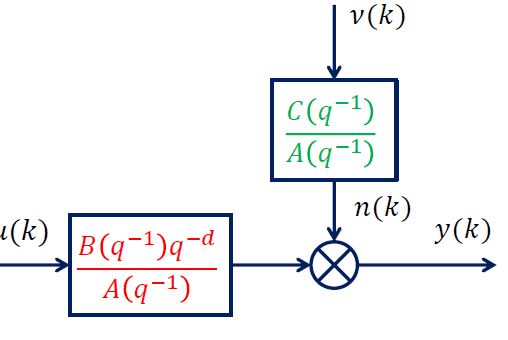
绿色部分能看作是白噪声经线性环节的输出,一般为有色噪声。
一般地,多项式𝑃 𝑧 在𝑧平面上的根或零点指满足𝑃 𝑧 = 0的𝑧的取值。若𝑃 𝑧 的根在𝑧平面上的单位圆内,即𝑧 < 1,则称𝑃 𝑧 为Hurwitz多项式。2.参数已知最小方差控制
假定系统(2)满足以下条件:
受控系统的时延𝑑及延迟算子多项式𝐴、𝐵和𝐶的阶次及系数都是已知的;
多项式𝐵和𝐶均为Hurwitz多项式。
𝑦(𝑘 + 𝑑)是一个未知的随机变量,我们通过保证包含𝑦(𝑘 + 𝑑)的某一随机变量的方差取最小来设计当前时刻的控制量𝑢(𝑘)。考虑到只能使用当前时刻和过去时刻的输入和输出值,我们需要将𝑦(𝑘 + 𝑑)表达为当前和过去时刻的输入和输出的表达式,然后设计𝑢(𝑘)。由于系统模型(2)中不含实际输出𝑦(𝑘 + 𝑑),因此需要对模型(2)进行变换以得到包含𝑦(𝑘 + 𝑑)的模型,这样即可用于实现包含𝑦(𝑘 + 𝑑)的某一随机变量的方差的最小化。将基于模型(2)变换得到的、包含𝑦(𝑘 + 𝑑)的模型称为预测模型。
2.1最小方差预测得出现
几个符号的含义
𝑦(𝑘+𝑑):未来时刻𝑘+𝑑的系统实际输出本身,或𝑘+𝑑时刻预测模型的输出,代表一个随机变量。
𝑦𝑘+𝑑/𝑘:基于𝑘和以前时刻的输入输出数据{𝑢𝑖,𝑦𝑖,𝑖≤𝑘},对未来时刻𝑘+𝑑时的系统实际输出本身或预测模型输出𝑦(𝑘+𝑑)的预测估计。也记为 𝑦𝑘+𝑑/𝑘。
𝑦𝑘+𝑑/𝑘=𝑦𝑘+𝑑−𝑦𝑘+𝑑/𝑘:预测误差。也记为 𝑦𝑘+𝑑。
预测模型
将(3)式写为
令红色部分为
其中
基于引入𝑞−𝑑的目的,由(6)式中的红色部分可知,𝐹 𝑞−1 的次数是𝑑 − 1,即𝑛𝑓 = 𝑑 − 1
将(5)式代入(4)式可得
由(3)式可得
将(7)式代入(6)式可得
观察(8)式,可以推测:红色部分是对于实际输出𝑦𝑘+𝑑的最优预测值。
最优预测器
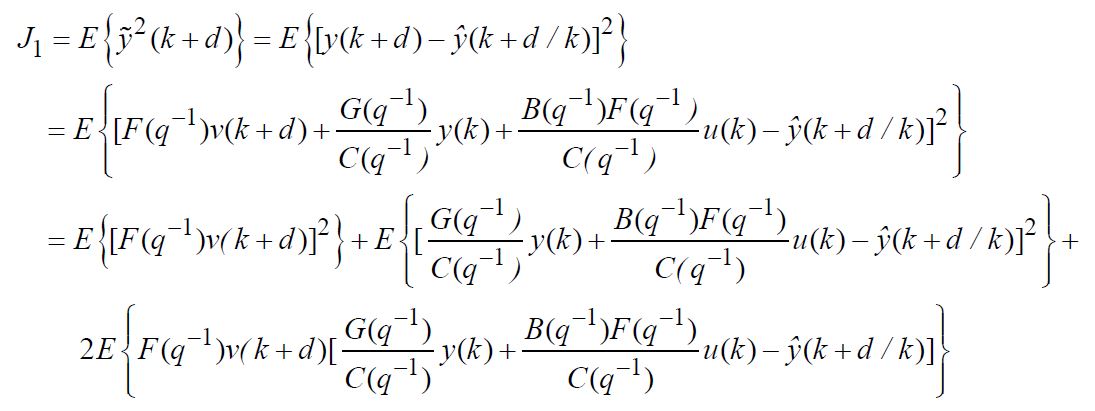
由于𝜈(𝑘 + 𝑑)与𝑦(𝑘)、𝑢(𝑘)相互独立,因此也与𝑦 𝑘 + 𝑑/𝑘 相互独立,故上式右边最后一项为0. 第一项是不可预测的,所以欲使𝐽1最小,只有使上式右边第二项为0,此时有:
最小预测方差为:
以上的预测模型以及最优预测器均是在假定𝐶 𝑞−1 是Hurwitz多项式的前提下得出的结果,即𝐶 𝑞−1 关于𝑞的根全部落在𝑞平面的单位圆内,这就保证了初始条件对最优预测器的作用与影响是以指数型速度衰减的。所以𝑘足够大时相当于稳态下的预测,也即初始条件的影响就无关紧要了。有时又称为最优稳态预测器。已有人提出当𝐶 𝑞−1 具有单位圆上零点的次最优预测器。
最优预测器(9)中出现了𝐹 𝑞−1 和𝐺 𝑞−1 ,故使用中必须确定出这两个量。一般地,当多项式𝐴 𝑞−1 、𝐶 𝑞−1 和时延步数𝑑已知后,这两个量可通过求解Diophantine方程唯一确定
Diophantine方程有两种解法,一种是长除法,另一种是比较系数法。
2.2最小方差控制
通过使得实际输出𝑦(𝑘 + 𝑑)与期望输出𝑦𝑟 (𝑘 + 𝑑)之间的误差的方差𝐽 =𝐸 𝑦 𝑘 + 𝑑 − 𝑦𝑟 (𝑘 + 𝑑) 2 取最小,设计当前时刻的控制律𝑢(𝑘)。
将预测模型(8)代入性能指标𝐽,并考虑最优预测方程(9)有:
上式右边第一项不可控,所以欲使𝐽最小,必须使
将最优预测的具体表达式代入上式,并经整理可得
从以上推导过程可以看出,最小方差控制律实际上是令𝑘 + 𝑑时刻的最优输出预测值等于期望输出时所得到的控制量。
特别地,对于输出调节问题,有𝑦𝑟 𝑘 + 𝑑 = 0。此时的最小方差控制律也称为最小方差调节律,可以简化为
最小方差控制设计概括
- 设被控过程的差分方程为𝐴 𝑞−1 𝑦 𝑘 = 𝐵 𝑞−1 𝑞−𝑑 𝑢 𝑘 + 𝐶 𝑞−1 𝜈 𝑘 ,其中,{𝜈(𝑘)}是独立同分布的白噪声序列,即𝜈(𝑘)~𝑁(0, 𝜎2);𝐵和𝐶均为Hurwitz多项式。那么,最小方差调节律为

- 其中,多项式𝐹 𝑞−1 和𝐺 𝑞−1 的阶分别为𝑑 − 1和𝑛𝑎 − 1;多项式的系数可通过求解下列Diophantine方程来确定:

- 控制律作用下的输出误差是𝑣(𝑘 + 𝑑)的𝑑 − 1阶滑动平均:

- 输出误差的最小方差为

最小方差控制的特性
- 输出误差的方差随系统延迟𝑑的增加而增加,即特性变坏。
- 当增益𝑏0的绝对值很小时,调节器的增益很大,将导致过大的控制信号𝑢(𝑘),这会加速调节器执行机构的磨损和损坏。
- 当受控对象是非最小相位时,最小方差自校正调节系统是不稳定的。
- 最小方差自校正调节器具有自校正特性。
3.参数未知情况下最下方差自校正控制
最小方差控制适用于对象参数已知和恒定的场合。当对象受内外干扰的影响以致于其模型不能再有效描述该对象时,就需要对过程模型进行修改,以适应环境条件的变化。修改模型时,可以利用输入输出数据重新辨识模型的结构和参数,也可以只辨识模型的参数而认为结构不变。这就是说,当对象参数变化时,能随着参数的变化在线估计出系统模型,并基于此模型设计出来的、使得期望性能指标达到最优(如输出误差的方差最小)的控制器称为自校正调节器。
当被控对象的参数未知或变化时将递推最小二乘参数估计与最小方差控制结合起来,就形成了最小方差自校正器。
自校正控制的两种形式:间接自校正控制和直接自校正控制。
3.1最小方差自校正调节器
此时,有𝑦𝑟 𝑘 + 𝑑 = 0。参照最小方差调节器(15)的形式,我们只需要估计出𝐺 𝑞−1 中包含的𝑛𝑎个参数和𝐵 𝑞−1 𝐹 𝑞−1 中包含的𝑛𝑏 + 𝑑个参数即可用于调节器的设计。将预测模型(8)重写如下:
最小方差控制由(15)式确定,即:
3.2最小方差自校正控制器
3.3最小方差自校正控制算法的收敛性
对于最小方差自校正调节算法的收敛性,Åström等人于1973年给出过结论:
- 设被控对象的参数辨识方程如(21)式所示,闭环系统的调节律如(23)所示,若𝑘⟶∞时,参数估计收敛到真值,即 𝜃⟶𝜃’,并且𝐺𝑞−1和𝐹′𝑞−1无公因子,则调节器(23)最终收敛到系统参数已知时的最小方差调节律。
- 对于最小方差自校正控制器算法也有类似的结论,这时控制器(28)收敛到参数已知时的最小方差控制规律。
总之,被估计的参数收敛到真值,是调节或控制规律收敛到最小方差规律的前提。

